 Minotauromaquia
Minotauromaquia
Je hebt een clawbot gebouwd maar het doet niets omdat je het niet hebt geprogrammeerd. Deze pagina neemt je stap voor stap mee door je clawbot te programmeren.
Stappen
- 1
 Verkrijg de programmeeromgeving. Je kunt RobotC hier gratis downloaden: http://www.robotc.net/download/vexrobotics/
Verkrijg de programmeeromgeving. Je kunt RobotC hier gratis downloaden: http://www.robotc.net/download/vexrobotics/ -
 2 Maak een nieuw stukje code. Ga naar Bestand / Nieuw / Nieuw bestand. U kunt ook een 'Competitiesjabloon' gebruiken als u van plan bent deze code te gebruiken in een competitie. Maar als u alleen uw robot test, werkt 'Nieuw bestand'.
2 Maak een nieuw stukje code. Ga naar Bestand / Nieuw / Nieuw bestand. U kunt ook een 'Competitiesjabloon' gebruiken als u van plan bent deze code te gebruiken in een competitie. Maar als u alleen uw robot test, werkt 'Nieuw bestand'. -
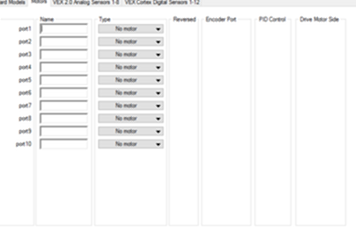 3 Stel de motoren in. Ga naar de instellingspagina motoren en sensoren (robot / motoren en sensoren). Wanneer het vak verschijnt, geeft u uw motornaam op (alles wat u wilt maar houdt u vast aan dingen als rechtsvoor en omhoog) in het bijbehorende poortnummer. Gebruik de vervolgkeuzelijst rechts om het type motor dat u gebruikt te selecteren en controleer of u het hebt omgekeerd of niet. U kunt vallen en opstaan gebruiken om uit te zoeken of het moet worden teruggedraaid of niet.
3 Stel de motoren in. Ga naar de instellingspagina motoren en sensoren (robot / motoren en sensoren). Wanneer het vak verschijnt, geeft u uw motornaam op (alles wat u wilt maar houdt u vast aan dingen als rechtsvoor en omhoog) in het bijbehorende poortnummer. Gebruik de vervolgkeuzelijst rechts om het type motor dat u gebruikt te selecteren en controleer of u het hebt omgekeerd of niet. U kunt vallen en opstaan gebruiken om uit te zoeken of het moet worden teruggedraaid of niet. - 4 Codeer de while-lus. Je zult zeker willen weten dat alle code om je motoren te besturen zich in een soort van oneindige lus bevindt. Dit zal uw programma soepel laten verlopen, omdat het constant controleert of de controller een motor vraagt om te bewegen.
taak hoofd() terwijl(1==1)
- 5 Codeer de wielen. Als u vier motoren voor uw wielen heeft, kunt u uw motoren twee aan elke kant opstellen. De code ziet er zo uit:
motor[leftF] = vexRT[Ch3]; motor[LINKSB] = vexRT[Ch3]; motor[rightF] = vexRT[Ch2]; motor[RECHTSB] = vexRT[Ch2];
Dit neemt een specifieke motor en wijst deze toe aan een kanaal; in dit geval 3 of 2. Dit zijn de y-as op de joysticks. De code neemt automatisch de positie van de joystick in en geeft de wielen het juiste toerental (omwentelingen per minuut). - 6 Codeer de lift. Hierdoor wordt de arm waarop je klauw staat hoger en lager.
als(vexRT[Btn5U]==1) motor[Lift]=127; anders als(vexRT[Btn5D]==1) motor[Lift]=-127; anders motor[Lift]=0;
Er wordt gezegd: als de Btn5U ingedrukt wordt gehouden, draait de hefmotor naar voren (met de klok mee) met een snelheid van 127 rpm. Dan- Als dat niet gebeurt, drukt u op Btn5D, als dat klopt, draait u de motor achteruit (tegen de klok in). Als niets van dat gebeurt, draai de motor dan helemaal niet. - 7 Voeg de klauwcode toe.
als(vexRT[Btn5U]==1) motor[Lift]=127; anders als(vexRT[Btn5D]==1) motor[Lift]=-127; anders motor[Lift]=0;
Deze code lijkt veel op de liftcode, maar in plaats van Btn5U en Btn5D wordt Btn6U en Btn6D gebruikt. Dit betekent dat je een andere set knoppen op je controller gebruikt voor de lift en klauw. Het andere verschil is dat dit stukje code de 'klauw' van de motor activeert in plaats van de 'lift' van de motor. -
 8 Test en pas uw nieuwe code aan. Nadat je je code hebt voltooid, compileer en download je deze naar je klauw (Windows - F5).
8 Test en pas uw nieuwe code aan. Nadat je je code hebt voltooid, compileer en download je deze naar je klauw (Windows - F5). - U kunt de knoppen wijzigen die de motoren activeren en het toerental van de motoren wijzigen. De snelste die standaard 393-motoren kunnen gebruiken, is 127 tpm.
- 9 Voel je vrij om met de code te spelen en te vinden wat voor jou werkt. Er zijn andere manieren om hetzelfde te laten gebeuren met robotC, maar het bovenstaande is het gemakkelijkst om te bewerken en te begrijpen.
 Verkrijg de programmeeromgeving. Je kunt RobotC hier gratis downloaden: http://www.robotc.net/download/vexrobotics/
Verkrijg de programmeeromgeving. Je kunt RobotC hier gratis downloaden: http://www.robotc.net/download/vexrobotics/  2 Maak een nieuw stukje code. Ga naar Bestand / Nieuw / Nieuw bestand. U kunt ook een 'Competitiesjabloon' gebruiken als u van plan bent deze code te gebruiken in een competitie. Maar als u alleen uw robot test, werkt 'Nieuw bestand'.
2 Maak een nieuw stukje code. Ga naar Bestand / Nieuw / Nieuw bestand. U kunt ook een 'Competitiesjabloon' gebruiken als u van plan bent deze code te gebruiken in een competitie. Maar als u alleen uw robot test, werkt 'Nieuw bestand'.  3 Stel de motoren in. Ga naar de instellingspagina motoren en sensoren (robot / motoren en sensoren). Wanneer het vak verschijnt, geeft u uw motornaam op (alles wat u wilt maar houdt u vast aan dingen als rechtsvoor en omhoog) in het bijbehorende poortnummer. Gebruik de vervolgkeuzelijst rechts om het type motor dat u gebruikt te selecteren en controleer of u het hebt omgekeerd of niet. U kunt vallen en opstaan gebruiken om uit te zoeken of het moet worden teruggedraaid of niet.
3 Stel de motoren in. Ga naar de instellingspagina motoren en sensoren (robot / motoren en sensoren). Wanneer het vak verschijnt, geeft u uw motornaam op (alles wat u wilt maar houdt u vast aan dingen als rechtsvoor en omhoog) in het bijbehorende poortnummer. Gebruik de vervolgkeuzelijst rechts om het type motor dat u gebruikt te selecteren en controleer of u het hebt omgekeerd of niet. U kunt vallen en opstaan gebruiken om uit te zoeken of het moet worden teruggedraaid of niet.  8 Test en pas uw nieuwe code aan. Nadat je je code hebt voltooid, compileer en download je deze naar je klauw (Windows - F5).
8 Test en pas uw nieuwe code aan. Nadat je je code hebt voltooid, compileer en download je deze naar je klauw (Windows - F5). Facebook
Twitter
Google+