 Minotauromaquia
Minotauromaquia
Uitgevonden in 1934 door O.G. Schmidt, elektrische trolling-motoren laten vissers hun boten op lagere snelheden bewegen dan trollingsnelheid met een buitenboordmotor en met meer controle dan met een peddel of roeispanen. Ze zijn ook een optie voor het voortstuwen van boten over meren waar "niet-waak" -regels van kracht zijn of in de meeste meren waar buitenboordmotoren met benzine niet zijn toegestaan. Trollingmotoren zijn beschikbaar voor zowel zoet- als zoutwatervissen en kunnen op 1 of 3 plaatsen worden gemonteerd: op de spiegel (achtersteven), op de motor zelf of op de boeg. Hieronder volgen instructies voor het monteren van een elektromotor op elk van deze plaatsen.
Methode één van de drie:
Een trollingmotor op de spiegel monteren
-
 1 Open de beugelklemmen. Op de spiegel gemonteerde trollingmotoren hebben 1 of 2 klemmen die in de montagebeugel zijn ingebouwd om de motor op zijn plaats te houden. Door de klemmen tegen de klok in te draaien (naar links), worden ze geopend.
1 Open de beugelklemmen. Op de spiegel gemonteerde trollingmotoren hebben 1 of 2 klemmen die in de montagebeugel zijn ingebouwd om de motor op zijn plaats te houden. Door de klemmen tegen de klok in te draaien (naar links), worden ze geopend. -
 2 Schuif de motor over de spiegel. De elektromotor moet zo dicht mogelijk bij het midden van de achtersteven worden geplaatst zonder de werking van de hoofdmotor te verstoren, als die er is. De bovenkant van de montagebeugel moet gelijk liggen met de bovenkant van de achtersteven.
2 Schuif de motor over de spiegel. De elektromotor moet zo dicht mogelijk bij het midden van de achtersteven worden geplaatst zonder de werking van de hoofdmotor te verstoren, als die er is. De bovenkant van de montagebeugel moet gelijk liggen met de bovenkant van de achtersteven. -
 3 Haal de klemmen aan. Draai de klemmen met de wijzers van de klok mee (naar rechts) tot aan de aanslag, zodat de motor tijdens gebruik niet los zal trillen.
3 Haal de klemmen aan. Draai de klemmen met de wijzers van de klok mee (naar rechts) tot aan de aanslag, zodat de motor tijdens gebruik niet los zal trillen. - Op de spiegel gemonteerde elektromotoren moeten zo worden geplaatst dat het midden van het motorgedeelte ten minste 9 inches (22,5 cm) onder water is terwijl de motor loopt om te voorkomen dat de schroef het wateroppervlak breekt. Dit produceert geluid dat vissen kan laten schrikken.
 1 Open de beugelklemmen. Op de spiegel gemonteerde trollingmotoren hebben 1 of 2 klemmen die in de montagebeugel zijn ingebouwd om de motor op zijn plaats te houden. Door de klemmen tegen de klok in te draaien (naar links), worden ze geopend.
1 Open de beugelklemmen. Op de spiegel gemonteerde trollingmotoren hebben 1 of 2 klemmen die in de montagebeugel zijn ingebouwd om de motor op zijn plaats te houden. Door de klemmen tegen de klok in te draaien (naar links), worden ze geopend.  2 Schuif de motor over de spiegel. De elektromotor moet zo dicht mogelijk bij het midden van de achtersteven worden geplaatst zonder de werking van de hoofdmotor te verstoren, als die er is. De bovenkant van de montagebeugel moet gelijk liggen met de bovenkant van de achtersteven.
2 Schuif de motor over de spiegel. De elektromotor moet zo dicht mogelijk bij het midden van de achtersteven worden geplaatst zonder de werking van de hoofdmotor te verstoren, als die er is. De bovenkant van de montagebeugel moet gelijk liggen met de bovenkant van de achtersteven.  3 Haal de klemmen aan. Draai de klemmen met de wijzers van de klok mee (naar rechts) tot aan de aanslag, zodat de motor tijdens gebruik niet los zal trillen.
3 Haal de klemmen aan. Draai de klemmen met de wijzers van de klok mee (naar rechts) tot aan de aanslag, zodat de motor tijdens gebruik niet los zal trillen. Methode twee van drie:
Een trollingmotor op de motor monteren
-
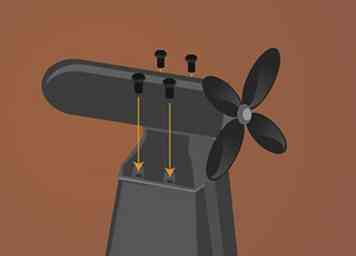
 1 Plaats de montagebeugel bovenop de anti-cavitatieplaat van de motor, met de motor omhoog. De anti-cavitatie is een horizontale plaat boven de schroef op een buitenboordmotor of de buitenboordmotor van een binnenboord-buitenboordmotor die voorkomt dat de schroef het wateroppervlak breekt terwijl deze de boot naar voren duwt. De montagebeugel is zo ontworpen dat wanneer de boot "op het vliegtuig" staat (de boeg stijgt uit het water als de boot over het oppervlak scheert), de trollingmotor het wateroppervlak breekt.
1 Plaats de montagebeugel bovenop de anti-cavitatieplaat van de motor, met de motor omhoog. De anti-cavitatie is een horizontale plaat boven de schroef op een buitenboordmotor of de buitenboordmotor van een binnenboord-buitenboordmotor die voorkomt dat de schroef het wateroppervlak breekt terwijl deze de boot naar voren duwt. De montagebeugel is zo ontworpen dat wanneer de boot "op het vliegtuig" staat (de boeg stijgt uit het water als de boot over het oppervlak scheert), de trollingmotor het wateroppervlak breekt. - Uw anti-cavitatieplaat moet op een diepte van minstens 13 inch (32,5 cm) onder de waterlijn lopen, zodat de elektromotor tijdens het gebruik ten minste 15 cm onder de waterlijn loopt.
-
 2 Markeer gaten die moeten worden geboord door de anti-cavitatieplaat. Gebruik de mount zelf als een sjabloon hiervoor.
2 Markeer gaten die moeten worden geboord door de anti-cavitatieplaat. Gebruik de mount zelf als een sjabloon hiervoor. -
 3 Boor de gaten voor de bevestigingsbouten. Gebruik een boor die scherp genoeg en sterk genoeg is om door het metaal van de anti-cavitatieplaat te boren.
3 Boor de gaten voor de bevestigingsbouten. Gebruik een boor die scherp genoeg en sterk genoeg is om door het metaal van de anti-cavitatieplaat te boren. -
 4 Plaats de montagebeugel opnieuw op de anti-cavitatieplaat.
4 Plaats de montagebeugel opnieuw op de anti-cavitatieplaat. -
 5 Plaats de bevestigingsbouten en draai ze vast. Hiermee wordt de elektromotor beveiligd.
5 Plaats de bevestigingsbouten en draai ze vast. Hiermee wordt de elektromotor beveiligd. - Aan de motor gemonteerde trollingmotoren zijn alleen ontworpen voor V-romp of tri-hull boten die "in het vliegtuig" gaan. Ze zijn niet ontworpen voor gebruik met pontonboten of met zeilboten.
 1 Plaats de montagebeugel bovenop de anti-cavitatieplaat van de motor, met de motor omhoog. De anti-cavitatie is een horizontale plaat boven de schroef op een buitenboordmotor of de buitenboordmotor van een binnenboord-buitenboordmotor die voorkomt dat de schroef het wateroppervlak breekt terwijl deze de boot naar voren duwt. De montagebeugel is zo ontworpen dat wanneer de boot "op het vliegtuig" staat (de boeg stijgt uit het water als de boot over het oppervlak scheert), de trollingmotor het wateroppervlak breekt.
1 Plaats de montagebeugel bovenop de anti-cavitatieplaat van de motor, met de motor omhoog. De anti-cavitatie is een horizontale plaat boven de schroef op een buitenboordmotor of de buitenboordmotor van een binnenboord-buitenboordmotor die voorkomt dat de schroef het wateroppervlak breekt terwijl deze de boot naar voren duwt. De montagebeugel is zo ontworpen dat wanneer de boot "op het vliegtuig" staat (de boeg stijgt uit het water als de boot over het oppervlak scheert), de trollingmotor het wateroppervlak breekt.  2 Markeer gaten die moeten worden geboord door de anti-cavitatieplaat. Gebruik de mount zelf als een sjabloon hiervoor.
2 Markeer gaten die moeten worden geboord door de anti-cavitatieplaat. Gebruik de mount zelf als een sjabloon hiervoor.  3 Boor de gaten voor de bevestigingsbouten. Gebruik een boor die scherp genoeg en sterk genoeg is om door het metaal van de anti-cavitatieplaat te boren.
3 Boor de gaten voor de bevestigingsbouten. Gebruik een boor die scherp genoeg en sterk genoeg is om door het metaal van de anti-cavitatieplaat te boren.  4 Plaats de montagebeugel opnieuw op de anti-cavitatieplaat.
4 Plaats de montagebeugel opnieuw op de anti-cavitatieplaat.  5 Plaats de bevestigingsbouten en draai ze vast. Hiermee wordt de elektromotor beveiligd.
5 Plaats de bevestigingsbouten en draai ze vast. Hiermee wordt de elektromotor beveiligd. Methode drie van drie:
Een trollingmotor op de boeg monteren
-
 1 Scheid de elektromotor van de montagevoet. Op een boog gemonteerde elektrische elektromotoren zijn ontworpen voor gebruik op boten met vlakke, verhoogde dekken aan de voorzijde. Deze soorten dekken worden meestal gevonden op basboten, die zijn ontworpen voor het vissen op largemouth bass in ondiep water rond onkruid en stronken waar nauwkeurige bootcontrole noodzakelijk is.
1 Scheid de elektromotor van de montagevoet. Op een boog gemonteerde elektrische elektromotoren zijn ontworpen voor gebruik op boten met vlakke, verhoogde dekken aan de voorzijde. Deze soorten dekken worden meestal gevonden op basboten, die zijn ontworpen voor het vissen op largemouth bass in ondiep water rond onkruid en stronken waar nauwkeurige bootcontrole noodzakelijk is. -
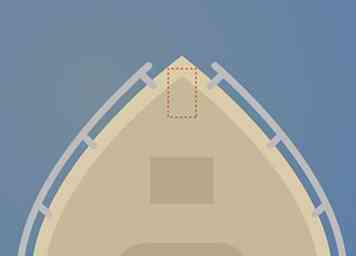 2 Kies de plaats op het dek waar de basis moet worden bevestigd. Plaats de bevestigingsbasis ergens waar deze de motor kan plaatsen, zowel wanneer deze aan de boot trekt als wanneer deze aan dek wordt opgeborgen terwijl de hoofdmotor van de boot hem door het water duwt. De basis moet ook worden geplaatst waar het voldoende ruimte biedt voor de motor om weg te breken van de basis als de motor een losbreekbevestiging gebruikt en waar de bevestigingsschroeven het dek maar niet de romp kunnen binnendringen.
2 Kies de plaats op het dek waar de basis moet worden bevestigd. Plaats de bevestigingsbasis ergens waar deze de motor kan plaatsen, zowel wanneer deze aan de boot trekt als wanneer deze aan dek wordt opgeborgen terwijl de hoofdmotor van de boot hem door het water duwt. De basis moet ook worden geplaatst waar het voldoende ruimte biedt voor de motor om weg te breken van de basis als de motor een losbreekbevestiging gebruikt en waar de bevestigingsschroeven het dek maar niet de romp kunnen binnendringen. -
 3 Markeer de gaten die in het dek moeten worden geboord. Gebruik hiervoor de montagevoet als sjabloon.
3 Markeer de gaten die in het dek moeten worden geboord. Gebruik hiervoor de montagevoet als sjabloon. -
 4 Boor de gaten voor de bevestigingsbouten. Gebruik een scherp bit om een diepte van 1/4 inch (6,5 mm) te boren en verwijder alle vuil na het boren. Als de boot van glasvezel is gemaakt, moet je de gaten verzinken.
4 Boor de gaten voor de bevestigingsbouten. Gebruik een scherp bit om een diepte van 1/4 inch (6,5 mm) te boren en verwijder alle vuil na het boren. Als de boot van glasvezel is gemaakt, moet je de gaten verzinken. -
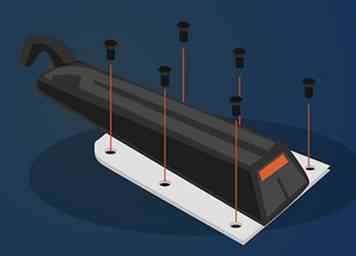 5 Steek een bout door elk gat in de montagevoet.
5 Steek een bout door elk gat in de montagevoet. -
 6 Schuif een rubberen ring op elke bout, onder de montagevoet. U wilt de ringen in de juiste positie houden met uw vingers terwijl u de montagevoet over de gaten in het dek beweegt. Als dit te moeilijk is, plaatst u de ringen over de geboorde gaten.
6 Schuif een rubberen ring op elke bout, onder de montagevoet. U wilt de ringen in de juiste positie houden met uw vingers terwijl u de montagevoet over de gaten in het dek beweegt. Als dit te moeilijk is, plaatst u de ringen over de geboorde gaten. -
 7 Plaats de basis over de geboorde gaten en schuif de bouten door elk gat.
7 Plaats de basis over de geboorde gaten en schuif de bouten door elk gat. -
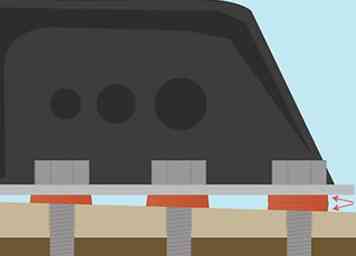 8 Controleer of de basis vlak tegen het dekoppervlak rust. Als dat niet het geval is, moet u meer rubberen sluitringen onder die bouten plaatsen waar de onderkant wiebelt om deze waterpas te zetten.
8 Controleer of de basis vlak tegen het dekoppervlak rust. Als dat niet het geval is, moet u meer rubberen sluitringen onder die bouten plaatsen waar de onderkant wiebelt om deze waterpas te zetten. - De basis moet gelijkmatig rusten, zodat de motor op het dek kan worden gehesen en kan worden vastgezet voor transport zonder te binden.
-
 9 Steek een stalen ring en borgmoer op elke bout. Draai de moeren aan om de basis vast te zetten.
9 Steek een stalen ring en borgmoer op elke bout. Draai de moeren aan om de basis vast te zetten. -
 10 Zet de motor op de basis vast.
10 Zet de motor op de basis vast. - Op een boog gemonteerde trollingmotoren moeten ten minste 12,5 cm onder het waterniveau lopen om ruw water mogelijk te maken. Als u uit een staande positie vist terwijl u de motor bestuurt, wordt een diepte van 30 cm aanbevolen.
 1 Scheid de elektromotor van de montagevoet. Op een boog gemonteerde elektrische elektromotoren zijn ontworpen voor gebruik op boten met vlakke, verhoogde dekken aan de voorzijde. Deze soorten dekken worden meestal gevonden op basboten, die zijn ontworpen voor het vissen op largemouth bass in ondiep water rond onkruid en stronken waar nauwkeurige bootcontrole noodzakelijk is.
1 Scheid de elektromotor van de montagevoet. Op een boog gemonteerde elektrische elektromotoren zijn ontworpen voor gebruik op boten met vlakke, verhoogde dekken aan de voorzijde. Deze soorten dekken worden meestal gevonden op basboten, die zijn ontworpen voor het vissen op largemouth bass in ondiep water rond onkruid en stronken waar nauwkeurige bootcontrole noodzakelijk is.  2 Kies de plaats op het dek waar de basis moet worden bevestigd. Plaats de bevestigingsbasis ergens waar deze de motor kan plaatsen, zowel wanneer deze aan de boot trekt als wanneer deze aan dek wordt opgeborgen terwijl de hoofdmotor van de boot hem door het water duwt. De basis moet ook worden geplaatst waar het voldoende ruimte biedt voor de motor om weg te breken van de basis als de motor een losbreekbevestiging gebruikt en waar de bevestigingsschroeven het dek maar niet de romp kunnen binnendringen.
2 Kies de plaats op het dek waar de basis moet worden bevestigd. Plaats de bevestigingsbasis ergens waar deze de motor kan plaatsen, zowel wanneer deze aan de boot trekt als wanneer deze aan dek wordt opgeborgen terwijl de hoofdmotor van de boot hem door het water duwt. De basis moet ook worden geplaatst waar het voldoende ruimte biedt voor de motor om weg te breken van de basis als de motor een losbreekbevestiging gebruikt en waar de bevestigingsschroeven het dek maar niet de romp kunnen binnendringen.  3 Markeer de gaten die in het dek moeten worden geboord. Gebruik hiervoor de montagevoet als sjabloon.
3 Markeer de gaten die in het dek moeten worden geboord. Gebruik hiervoor de montagevoet als sjabloon.  4 Boor de gaten voor de bevestigingsbouten. Gebruik een scherp bit om een diepte van 1/4 inch (6,5 mm) te boren en verwijder alle vuil na het boren. Als de boot van glasvezel is gemaakt, moet je de gaten verzinken.
4 Boor de gaten voor de bevestigingsbouten. Gebruik een scherp bit om een diepte van 1/4 inch (6,5 mm) te boren en verwijder alle vuil na het boren. Als de boot van glasvezel is gemaakt, moet je de gaten verzinken.  5 Steek een bout door elk gat in de montagevoet.
5 Steek een bout door elk gat in de montagevoet.  6 Schuif een rubberen ring op elke bout, onder de montagevoet. U wilt de ringen in de juiste positie houden met uw vingers terwijl u de montagevoet over de gaten in het dek beweegt. Als dit te moeilijk is, plaatst u de ringen over de geboorde gaten.
6 Schuif een rubberen ring op elke bout, onder de montagevoet. U wilt de ringen in de juiste positie houden met uw vingers terwijl u de montagevoet over de gaten in het dek beweegt. Als dit te moeilijk is, plaatst u de ringen over de geboorde gaten.  7 Plaats de basis over de geboorde gaten en schuif de bouten door elk gat.
7 Plaats de basis over de geboorde gaten en schuif de bouten door elk gat.  8 Controleer of de basis vlak tegen het dekoppervlak rust. Als dat niet het geval is, moet u meer rubberen sluitringen onder die bouten plaatsen waar de onderkant wiebelt om deze waterpas te zetten.
8 Controleer of de basis vlak tegen het dekoppervlak rust. Als dat niet het geval is, moet u meer rubberen sluitringen onder die bouten plaatsen waar de onderkant wiebelt om deze waterpas te zetten.  9 Steek een stalen ring en borgmoer op elke bout. Draai de moeren aan om de basis vast te zetten.
9 Steek een stalen ring en borgmoer op elke bout. Draai de moeren aan om de basis vast te zetten.  10 Zet de motor op de basis vast.
10 Zet de motor op de basis vast. Facebook
Twitter
Google+